
 登录
登录 注册
注册

电力新闻
用电常识
传统的鼠笼式异步电动机起、制动控制方式一般有四种,即定子回路串电阻起动,Y/△起动,自耦变压器起动和延边三角形起动;制动方式有三种,反接制动,能耗制动和电容制动,其中任何一种起、制动控制方式的实现通常由继电器-接触器控制系统来完成。下面就以定子回路串电阻降压起动和反接制动为例,分析由继电器-接触器实现的鼠笼式异步电动机的起、制动控制
传统的鼠笼式异步电动机起、制动控制方式一般有四种,即定子回路串电阻起动,Y/△起动,自耦变压器起动和延边三角形起动;制动方式有三种,反接制动,能耗制动和电容制动,其中任何一种起、制动控制方式的实现通常由继电器-接触器控制系统来完成。下面就以定子回路串电阻降压起动和反接制动为例,分析由继电器-接触器实现的鼠笼式异步电动机的起、制动控制
2017-01-05 00:00:00
·
机电之家 阅读:419
橙电公众号

橙电APP

传统的鼠笼式异步电动机起、制动控制方式一般有四种,即定子回路串电阻起动,Y/△起动,自耦变压器起动和延边三角形起动;制动方式有三种,反接制动,能耗制动和电容制动,其中任何一种起、制动控制方式的实现通常由继电器-接触器控制系统来完成。下面就以定子回路串电阻降压起动和反接制动为例,分析由继电器-接触器实现的鼠笼式异步电动机的起、制动控制

声明:本文内容来源自网络,文字、图片等素材版权属于原作者,橙电平台转载素材出于传递更多信息,文章内容仅供参考与学习,切勿作为商业目的使用。
如果侵害了您的合法权益,请您及时与我们联系(2430586914@qq.com),我们会在第一时间进行处理!我们尊重版权,也致力于保护版权,橙电平台感谢您的分享!
-
很多新手对电气图设计看不懂或者根本不知道从哪里下手,这次就教大家来学习下电气图基础知识。
-
随着工程师开发日益复杂的方案来满足舒适、安全、娱乐、动力总成、引擎管理、稳定性和控制应用的需求,现代车载电子产品的数量将持续稳定地增长。此外,随着非常复杂精密的电子产品在汽车应用中的日益普及,即使最基本型的车辆也配置了几年前一直是高档车才有的电子设备
-
种种迹象表明,太阳能正朝着主流发电能源的方向前进。日前,美国太阳能项目开发商BrightSource能源公司表示,正在研发新的存储技术,该技术可以使太阳能电站在太阳下山后,没有阳光的情况下继续发电供电
-
调制解调器是一种计算机硬件,它能把计算机的数字信号翻译成可沿普通电话线传送的模拟信号,而这些模拟信号又可被线路另一端的另一个调制解调器接收,并译成计算机可懂的语言。这一简单过程完成了两台计算机间的通信
-
变压器局部放电问题的探讨 局部放电是指发生在电极之间但并未贯穿电极的放电,它是由于设备绝缘内部存在弱点或生产过程中造成的缺陷,在高电场强度作用下发生重复击穿和熄灭的现象。它表现为绝缘内气体的击穿、小范围内固体或液体介质的局部击穿或属表面的边缘及尖角部位场强集中引起局部击穿放电等
-
并网难题一直是风电上网难以逾越的障碍。风电自身不稳定性与间歇性给电网带来的冲击不可小视,如何解决风电上网成为风电行业最为关注的焦点
-
冰山,通常我们看到的是漂浮在水面上的小山峰,而实际上,还有巨大的体积都在水面以下,那是我们肉眼所看不到的。大多数的费用节余也可以用同样的方式来思考
-

最近,当你打开电视或网站时,一定会看到许多关于迷你屋热潮的新闻。更小代表更好,对吗?同样,手机制造商们也在推销新一代手机的小巧、轻薄和轻便
-
温度开关选型 1 :额定工作电压(V) 2: 额定工作电流(A) 3: 开机电流(A) 4: 堵转电流(A) 5: a:安装方式:内埋式,外置式 b:浸漆方式:滴漆,沉浸漆,真空浸漆,不浸漆 6: 对电流敏感的温度开关:17AME系列,TP1系列 对温度敏感的温度开关:S01系列,突跳式温度开关 KSD301温控器注意事项 ⑴ 接地方式:通过温控器金属外盖与设备接地金属部件相连。 ⑵ 采用接触感温式安装时,应使金属盖面贴紧被控器具的安装面,为确保感温效果,应在 感温表面涂上导热硅脂或其它性能类似的导热介
-
温度控制器是对空调房间的温度进行控制的电开关设备。温度控制器所控制的空调房间内的温度范围一般在18℃--28℃

-
三峡能源昔阳300 兆瓦光伏+储能发电项目送出线路对侧松溪500kV变电站间隔EPC施工总承包招标公告(招标编号:HFXYGF 2023060002)
2023-07-12 20:42 -
三峡能源昔阳300兆瓦光伏+储能发电项目施工类企业协作分包商招标公告招标编号:HFXYGF 2023060001
2023-06-29 15:51 -
橙电整理了2022.25更新的立项、设计阶段的能源项目信息汇总,供各电力企业参考,共10条。
2022-02-25 16:48 -
橙电平台-国内专注于电力行业服务的综合平台,集招标、采购、征信查询、租赁、电力标讯以及企业营销等服务于一体。橙电整理了2021.08.24更新的立项、设计阶段的能源项目信息汇总,供各电力企业参考,共20条。
2021-08-24 09:41 -
橙电整理了2021.08.05更新的立项、设计阶段的能源项目信息汇总,供各电力企业参考,共11条。
2021-08-05 14:49 -
橙电整理了2021.01.15更新的立项、设计阶段的能源项目信息汇总,供各电力企业参考,共14条。
2021-01-15 09:50 -
橙电整理了2020.11.19更新的立项、设计阶段的能源项目信息汇总,供各电力企业参考,共16条。
2020-11-19 16:36 -
橙电整理了2020.11.12更新的立项、设计阶段涉及电力工程的大项目信息汇总,供各电力企业参考,共19条。
2020-11-13 14:31 -
橙电整理了2020.11.2更新的立项、设计阶段涉及电力工程的大项目信息汇总,供各电力企业参考,共13条。
2020-11-02 16:19 -
橙电整理了2020.10.22更新的立项、设计阶段涉及电力工程的大项目信息汇总,供各电力企业参考,共16条。
2020-10-22 15:37
-
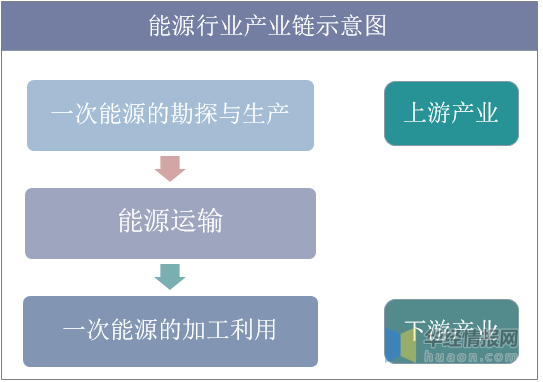
能源是能够提供能量的资源,这里的能量通常指热能、电能、光能、机械能、化学能等。能源产业链上游指的是一次能源的勘探与生产,中游是能源运输,下游则是对一次能源的加工利用。能源行业还包括能源相关的设备、工程和服务等行业,这些行业为能源的上中下游提供设备制造、工程承包、能源技术服务等服务,属于能源行业的外围产业。
2020-06-01 09:44 -
在过去的一年里,全球可再生能源装机仍继续保持着快速增长。在全球各国积极支持和推动生物质能发电项目的情况下,全球生物质能发电得到了前所未有的发展,生物质能装机容量实现了持续稳定的上升,2009年全球生物质发电装机容量为6100万千瓦,至2019年达到12380万千瓦,十年间翻了一番。
2020-05-30 09:28 -
【来源:麦电网ID:maidianet】
2020-04-29 15:41 -
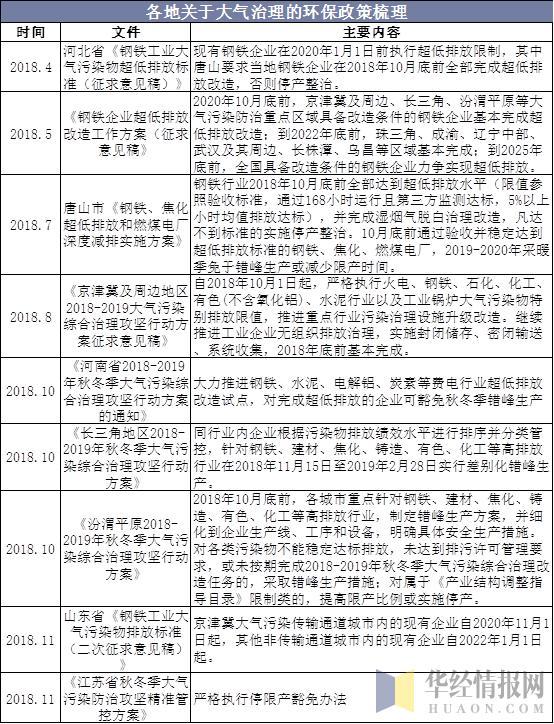
随着中国对大气污染等环境问题关注度的日益增强,为环保企业的发展带来了巨大的机遇,中国环保产业正处于发展的黄金期。然而,机会与风险并存是市场的特色,特别是对于受行业政策影响程度较大、市场监管力度不强的环保产业,企业进入市场投资发展的困惑更多。帮助企业准确把握行业发展机遇,理清面临的问题,对于企业进入节能环保产业市场并发挥主体作用具有重要意义。
2020-02-17 08:13 -
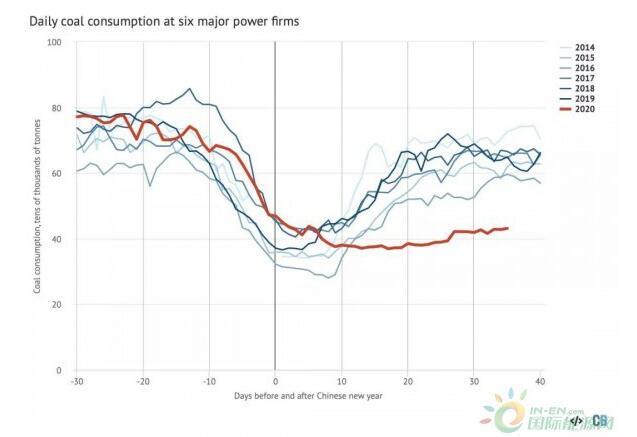
――发电厂的煤炭消耗量下降:36%
2020-03-06 16:23 -
房庆表示,目前,我国正面临资源与能源安全问题、环境污染问题和来自国际应对气候变化及地缘政治的巨大压力,生态文明建设也正处于压力叠加、负重前行的关键期,要认真学习领会习近平总书记生态文明思想,切实增强做好生态文明建设的责任感、使命感。
2019-12-30 11:00 -
正值规划研究之年,诸多重点问题引发关注。相比“十三五”,我国能源生产与消费的形势将发生哪些变化?与其相适应的规划内容,需要作出哪些调整?面对新时代的新挑战,能源产业如何取得新突破?近期举行的多场会议上,来自不同领域的权威专家纷纷表达观点。
2019-12-17 09:14 -
2019年1-7月,铜川市能源工业增加值同比增长0.6%,增速年内首次由负转正,占规模以上工业增加值的比重为62.8%,贡献率为5.9%,拉动工业增加值增速0.4个百分点。主要行业“三增一降”。1-7月,全市煤炭开采和洗选业同比增长0.8%,石油和天然气开采业增长72.4%,石油、煤炭及其他燃料加工业增长170.6%,电力、热力生产和供应业下降3.6%。四大行业占规上工业的比重分别为47.9%、0.7%、0.4%和13.8%。主要能源产品产量“两降一增”。1
2019-09-03 00:00 -
2019年上半年,南通市规上工业企业综合能耗为769.2万吨标准煤,同比下降1.1%,降幅较上半年扩大0.7个百分点。分门类看,制造业企业节能形势较好,今年来一直处于负增长态势,制造业综合能耗402.5万吨标准煤,同比下降1.8%,较上半年降幅收窄0.1个百分点,电力、热力生产和供应业综合能耗366.7万吨标准煤,同比下降0.4%,增速由正转负,带动规上工业综合能耗增速小幅回落。show_article();
1970-01-01 08:00 -
2019年6月份全国铁路煤炭发运量2.04亿吨,同比增加4.5%。1-6月发运煤炭12亿吨,同比增加2.3%。show_article();
1970-01-01 08:00
-
2020-08-31 10:00
-
2020-08-31 10:30
-
近日,中国石化集团与陕西省人民政府通过书面传签的方式,正式签署地热能资源开发利用战略合作协议。
2020-08-31 10:29 -
8月29日,广汽丰田新能源车产能扩建项目二期(下称“广汽丰田项目二期”)正式动工,助力构建广东新能源汽车产业集群。该项目占地面积74万平方米,达产后每年将贡献在地产值500亿元以上。届时,广汽丰田产能将得到大幅度提升,并带动发展周边零部件配套厂商超30家,每年贡献在地工业产值超千亿元。
2020-08-31 10:13 -
今年7月24日,中日(上海)地方发展合作示范区在临港新片区挂牌,作为全国仅有的6个中日地方发展合作示范区之一,未来将建设一个以氢能产业为重点的新能源产业集群。而在“以国内大循环为主体、国内国际双循环相互促进”的新发展格局中,临港新片区把做好政策集成创新试点、为全国氢能产业打造可推广的“临港模式”作为未来发展使命和目标。
2020-08-31 10:12 -
8月27日,陕西电力交易中心组织了9月份新能源和火电打捆外送湖北交易,成交电量3000万千瓦时,打捆比例3:7。这是陕西新能源绿电首次在8月14日参与省内“绿电绿用”交易后,进一步实现跨省区“新火打捆”绿电外送交易新的突破,对陕西开拓省外电力市场具有重要意义。
2020-08-31 10:14 -
2020-08-31 10:15
-
27日,新能源产业发展(潍坊)大会举行。此次大会由潍坊市人民政府、山东省国资委主办,潍柴集团、潍坊市国资委承办,是新能源产业发展的全国盛会。
2020-08-31 10:16 -
记者从大连市统计局获悉,“十三五”以来,新能源产业发展是大连市能源供给侧改革的重要组成部分,新能源发电量已远超越传统火力发电量,在大连市电力结构中占据重要位置。
2020-08-31 10:18 -
8月25日,澳大利亚区块链公司PowerLedger宣布其将在泰国及东南亚地区推出可再生能源证书(RECs)交易市场。
2020-08-31 10:21
-
关注
2020-10-10 00:00 -
关注
2020-10-10 00:00 -
关注
2020-10-07 00:00 -
关注
2020-10-09 00:00 -
关注
2020-10-09 00:00 -
关注
2020-09-29 00:00 -
关注
2020-09-30 00:00 -
关注
2020-09-29 00:00 -
关注
2020-09-27 00:00 -
关注
2020-09-28 00:00
-
慧聪安防网讯 2018年7月12日,第20届中国国际建筑装饰博览会落下帷幕,作为智能门控行业领导品牌的瓯宝,以智能锁为核心,将科技、创新与设计理念高度融合,轻取收官之战,获得圆满成功。 在此次盛会中,瓯宝携旗下Z82、Z83、Z88、Z67和全新黑科技屏下识别P50系列智能锁产品在广交会展馆A区5.1馆30展位全新亮相,并引爆全场
2018-07-20 00:00 -
慧聪安防网讯 第一章“呼叫通”三合一电梯控制系统简介及设计依据 呼叫通电梯管理系统简介 安本天下呼叫通电梯管理系统由梯控设备、电梯运行信息检测设备、五方通话与视频监控、管理中心等四个大部分组成。其中智能人脸识别梯控设备部分由安装在电梯轿厢的人脸识别一体机和控制器以及人脸采集器组成
2018-07-20 00:00 -
慧聪安防网讯 一、方案背景 近年来,恐怖袭击与极端暴力事件屡有发生,造成了巨大的人身、财产安全损失,产生了重大的社会经济影响。随着城市规模的不断扩大、社会形势日益复杂,有限的安保资源与社会不断增长的需求矛盾不断突出,导致城市安全正面临巨大挑战
2018-07-20 00:00 -
慧聪安防网讯 近日,上海市质量技术监督局,发布了《入侵报警系统应用基本技术要求》等七项地方标准的通知公告。其中涉及两项安全技术防范标准:DB31/T1086-2018《入侵报警系统应用基本技术要求》、DB31/T294-2018《住宅小区智能安全技术防范系统要求(代替DB31/T294-2010)》,该标准将与2018年8月1日正式实施
2018-07-20 00:00 -
慧聪安防网讯 安保人员A:“上个月,我们刚安装的视频监控没画面了!” 安保队长:“立马检查,查出问题,即刻恢复!” 安保人员A:“已派人检查,无法查到故障。” 安保队长:“情况紧急,马上通知视频厂家,争分夺秒维修!” 对于
2018-07-20 00:00 -
慧聪安防网讯 7月19日,以“开启新时代中国经济新征程”为主题的2018中国财经峰会在北京举行。财经峰会设立于2012年,由众多财经及大众媒体联袂打造,致力于汇聚和分享商业智慧,传递主流商业价值观,被称为经济领域最具影响力的思想交流平台
2018-07-20 00:00 -
慧聪安防网讯 近几年,随着生物特征识别技术的不断发展成熟,生物特征识别技术在门禁系统中的应用逐渐变成主流。生物特征识别门禁系统是以人的生物特征为识别条件的门禁系统,主要包括对人脸识别、指纹识别、虹膜识别、掌纹识别、指静脉识别、声纹识别等
2018-07-20 00:00 -
慧聪安防网讯 人才缺失制约人工智能发展 一将难求,正是眼下如火如荼的人工智能行业的真实写照。人才,尤其是高水平人才的匮乏,正成为制约人工智能快速健康发展的一个瓶颈
2018-07-20 00:00 -
慧聪安防网讯 如今,英国几乎所有(88%)组织都采用了云计算技术,这与2012年相比大幅增加,当时只有一半以上。这不可避免地导致了存储在云中的客户数据量的增加,以支持从在线服务和网站到销售和基础设施的所有内容
2018-07-20 00:00 -
慧聪安防网讯 今年以来,人工智能领域的发展迎来了新一波高潮。 人工智能消费级应用落地的速度不断加快,同时,市场和需求愈加细分
2018-07-20 00:00
TOPS
-
日排行
/
-
周排行
/
- 原创
- 日排行 /
- 周排行 /
- 原创
MORE+ 电力要闻
-
2020年10月11日
-
2020年10月11日
-
2020年10月11日电力电量平衡的目标和方法
-
2020年10月11日为加强新能源汽车动力蓄电池梯次利用管理,提升资源综合利用水平,保障梯次利用电池产品的质量,我们组织编制了《新能源汽车动力蓄电池梯次利用管理办法》。现将征求意见稿向社会公开征求意见,如有意见或建议,请于2020年11月8日前反馈工业和信息化部节能与综合利用司。
-
2020年10月11日山东电力现货市场原定今年9月开展连续4个月的电力现货结算试运行。但因今年5月第三次调电运行及试结算中,山东现货试点在短短四天内即产生了近亿元“不平衡资金”,在“电改圈”内引发高度关注推迟至今。(报道链接:不平衡资金逼停电改?评论丨取消电价“双轨制”势在必行)